



引言
随着我国经济、科学技术的发展,核科学的研究与应用也同时在大幅度地发展,先后建设了多座现代化的核电站。核科学装置涉及发生装置、冷却装置、防辐射屏蔽装置、传动装置等,防辐射屏蔽装置是其中尤为重要的部分,担负着隔离辐射源、保护实验人员工作环境以及保护外部环境的职责。然而,防辐射屏蔽装置本身就处于辐射环境与无辐射环境(或轻辐射环境)之间,其内部所包括的靶站屏蔽块及其他部件长期受到大量强辐射的影响,需要定期更换,而屏蔽块固定螺栓的拆卸和安装是靶站遥控维护的关键重点技术。对于靶站而言,第一,是禁止工作人员进入的场所,由于强辐射会对人体组织、细胞造成不可逆的伤害,因此屏蔽块固定螺栓的拆卸和安装常常需要远程机械手或机器人进行操作:第二,用于屏蔽块安装的固定螺栓在空间上有不同高度的分布,如果在屏蔽块的周围设置吊装的机械手活动导轨并配有吊装机械手,该方法不仅制作复杂,而且会增加成本,还存在死角位置。利用在地面移动的机器人对固定的螺栓进行拆装不仅能够降低设计的复杂性,而且移动机器人移动的轻便型也会使得屏蔽块固定螺栓拆装的难度降低。本文研究一种移动灵活、可对不同高度的固定螺栓进行作业的机器人在辐射环境下的应用。
1全向轮移动平台设计
机器人在与实验人员隔离的辐射环境下工作是需要通过遥控信号进行的,机器人移动的灵活性很大程度上取决于移动平台的本身,常见的直流电机驱动橡胶轮的移动平台在转弯时表现得比较笨拙,特别是移动平台的上方还需要进一步承载升降机械手装置,其导致轮子与地面的摩擦力倍增,即转弯的灵活性降低,还会造成橡胶轮的易损现象。
现有的著名的麦克纳姆轮移动平台具有全方位移动的功能优势,适合本文的应用环境,但除了麦克纳姆轮式全方位移动平台,还可以利用全向轮式的移动平台来实现本文的需求。全向轮式移动平台的关键结构在于全向轮,每个全向轮由若干个小滚轮组成,各个滚轮的母线组成一个完整的圆。机器人既可以沿轮面的切线方向移动,也可以沿轮子的轴线方向移动,这两种运动的组合即可实现平面内任意方向的运动。为增加移动平台的稳定性,往往需要通过组合多个全向轮构成该平台,然而全向轮的组合方法,即轮系,影响着组合后的结构能否产生全向移动的情况。
本文设计的全向轮式移动平台如图1所示,利用三个全向轮组合,三个全向轮均匀分布在一个圆周上,其运动学模型如图2所示,设v8的方向为转向正方向,即逆时针转向为正,在切线方向上,图中的v1、v2、v3都是该点的正方向,当三者的数值相等时,该平台能平稳地进行逆时针转向,即可以任意变化移动的角度:当三者有一速度值为零,另外两者速度值相等,并且转向互为相反,此时合速度正指速度为零的全向轮的轴心,该情况产生直线运动。如此构成的全向移动平台较于一般的轮式移动平台,可以利用车轮所具有的定位和定向功能,实现狭窄环境的自由移动,特别适用于核环境下屏蔽块安装场所的运输机械手作业任务。

2机械手举升机构设计
遥控全向移动平台便能灵活地运载机械手在屏蔽块周围进行维护工作,但如果仅是将机械手设置在全向移动平台的上方,那么该机械手的可活动范围只有一个小高度,对于屏蔽块高处的固定螺栓就接触不到了。为了增加机械手在竖直方向上的可活动范围,本文在全向移动平台与机械手之间设计了剪叉式液压举升机构,如图3所示,主要由导轨、液压推杆、剪叉架、支撑结构组成,液压油由叶片泵构成一定的压力,经滤油器、隔爆型电磁换向阀、节流阀、液控单向阀、平衡阀进入液缸下端,使液缸的活塞向上运动,完成抬升机械手动作:当回油至液缸上端,液压推杆回收,机械手就能相应地下降。

图3 液压剪叉式举升机构及机械手
液压升降渠道主要是经过液压油的压力传动从而完成升降的作用,其剪叉式机械结构,使承载平台的升降有较高的稳定性。结合剪叉式的机架,可伸长又可折叠,使得高空工作规模更大。举升机构影响着机械手末端夹具的效率,摇晃的举升机构会导致工作人员在遥控机械手时与螺栓固定定位的难度增加,而经剪叉式液压举升机构抬升的机械手在高空工作中效率更高,安全性更强。
3结语
本文围绕辐射环境下遥控维护的高空作业机器人开发,主要探讨了全向轮移动平台的设计以及机械手举升机构的设计,可为该应用环境下的机器人研究提供一定的参考。
 塔克热系统在中国光博会隆重推出高性能光电应用中的最新主动制冷技术
塔克热系统在中国光博会隆重推出高性能光电应用中的最新主动制冷技术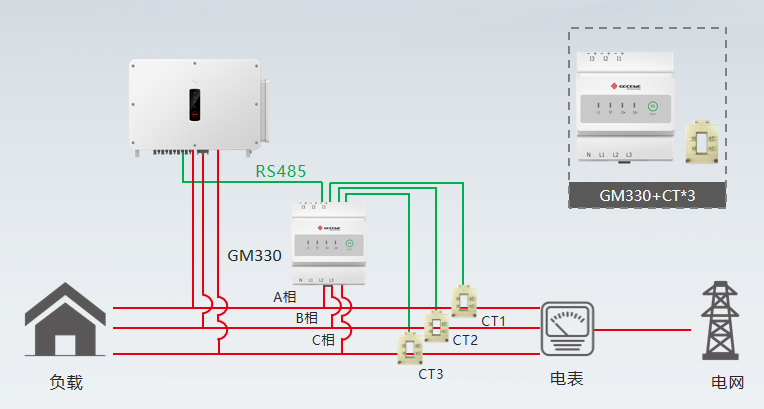 固德威防逆流安装调试指南
固德威防逆流安装调试指南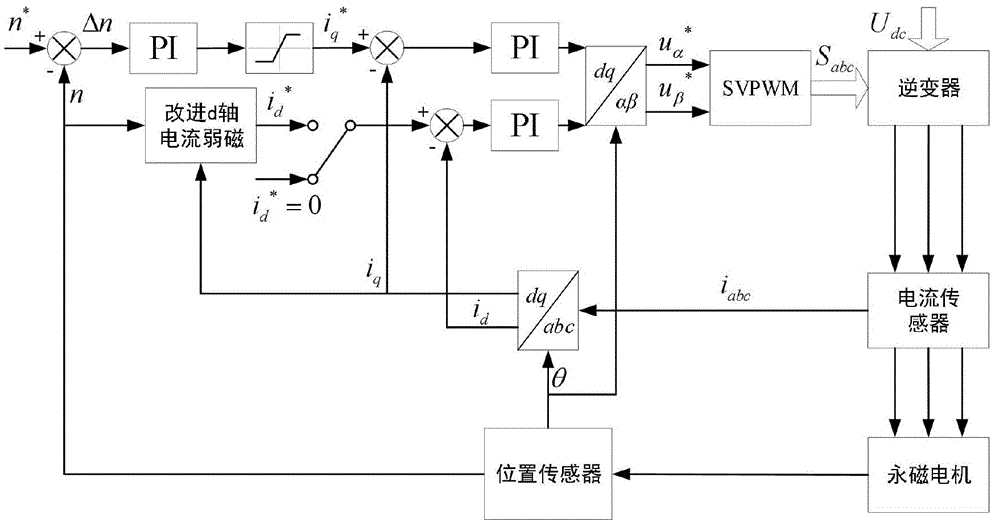 无刷电机弱磁控制:技术原理与实战应用
无刷电机弱磁控制:技术原理与实战应用 用于离线式开关电源的内部电源电路
用于离线式开关电源的内部电源电路






 慧聪电子网微信公众号
慧聪电子网微信公众号
 慧聪电子网微信视频号
慧聪电子网微信视频号

精彩评论